Computer-Aided Surgery and Medical Image Processing Laboratory

School of Computer Science and Engineering
The Hebrew University of Jerusalem, Israel
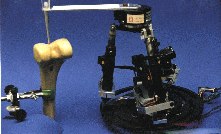
Minimally invasive image guided robotic system

Parallel robot (Technion)
|

Fluoroscopic image-based registration
|
Participants
M. Shoham, L. Joskowicz, Z. Yaniv, C. Milgrom, M. Roffman.
Related site
Robotics Laboratory, Technion.
Project description
We have started developing new devices and procedures for precise
minimally-invasive image-guided orthopaedic surgery. Our technical focus
is in two areas: (1) the development of novel miniature robotic devices,
and (2) the development of new fluoroscopy-based modeling and registration
techniques. The key concept behind our technical focus is to use corrected
and calibrated fluoroscopic images containing specially shaped robot tip
and the anatomy of interest to perform accurate intraoperative modeling and
registration without the need of implanted fiducials or direct contact.
This image-based technique is essential for percutaneous procedures and has
the potential to reduce the morbidity of fiducial-based and open
procedures, and improve the outcomes of the traditional procedure. Our
clinical focus will first be on spine procedures, including percutaneous
and transpedicular screw placement and percutaneous discectomy. Later,
will also explore improvements to illiosacral screw placement, dynamic hip
screw placement, knee arthroscopy, total knee replacement, and elbow and
shoulder procedures.
The novel medical robots are based on two ideas. One is the development of
new parallel robot structures, which by their very nature will better fit
the medical requirements of surgery. Parallel structures are much more
compact than the commonly used serial ones. They are more accurate and
their reduced work volume is a big safety advantage in medical applications
where the required motions are small. The second idea is the development
of a miniature robot that attaches directly to the bone. The miniature
robot, which is more than one order of magnitude smaller than a
conventional PUMA, will simplify and even eliminate the need for a separate
registration procedure and for tracking bone motion.
The motivation to use C-arm X-ray fluoroscopy for intraoperative bone
modeling, spatial location, and registration is that it is immediate,
non-invasive, and ubiquitously available. Although it produces radiation,
controlled use of several dozen static shots per case (as opposed to
continuous fluoroscopy or several hundred static shots as it is common now)
will greatly reduce the surgeon's cumulative exposure to radiation while
retaining the benefits of this imaging modality. To be useful for precise
procedures, the camera must be calibrated and the images must be corrected
from geometric distortion. Then, the images must be correlated and
registered to each other. Preliminary results of our on-going work in this
area demonstrate that sub-millimetric accuracy is obtainable in
fluoroscopic image processing. We are developing develop robust and
practical algorithms for fluoroscopy image processing, modeling and
anatomy-based registration with CT surface models. We will emphasize
integration, simplicity, full automation, and practicality.
![[Back]](arrow2.gif) Back to the CAS Lab Page
Last modified: January 31st, 2002.
Back to the CAS Lab Page
Last modified: January 31st, 2002.