Computer-Aided Surgery and Medical Image Processing Laboratory
School of Computer Science and Engineering
The Hebrew University of Jerusalem, Israel
School of Computer Science and Engineering
The Hebrew University of Jerusalem, Israel

|

|

|

|
|
|
We are currently developing a computer-integrated system, called FRACAS, for assisting surgeons in closed reduction of long bone fractures. Fluoroscopy-based orthopaedic procedures crucially depend on the ability of the surgeon to mentally recreate the spatio-temporal intraoperative situation from uncorrelated, two-dimensional fluoroscopic X-ray images. Significant skill, time, and frequent use of the fluoroscope are required, leading to positioning errors and complications in a non-negligible number of cases, and to significant cumulative radiation exposure of the surgeon. Recent research shows that computer-aided systems can significantly improve the accuracy of orthopaedic procedures by replacing fluoroscopic guidance with interactive display of 3D bone models created from preoperative CT studies and tracked in real time. Examples include systems for acetabular cup placement, total knee arthroplasty planning and total knee replacement, and systems pedicle screw insertion.
FRACAS' goals are to reduce the surgeon's cumulative exposure to radiation and improve the positioning and navigation accuracy, and to improve preoperative planning. FRACAS replaces uncorrelated static fluoroscopic images with a virtual reality display of three-dimensional bone models created from preoperative Computerized Tomography CT data and tracked intraoperatively in real-time. Fluoroscopic images are used for registration -- establishing a common reference frame -- between the bone models and the intraoperative situation, and to verify that the registration is maintained.
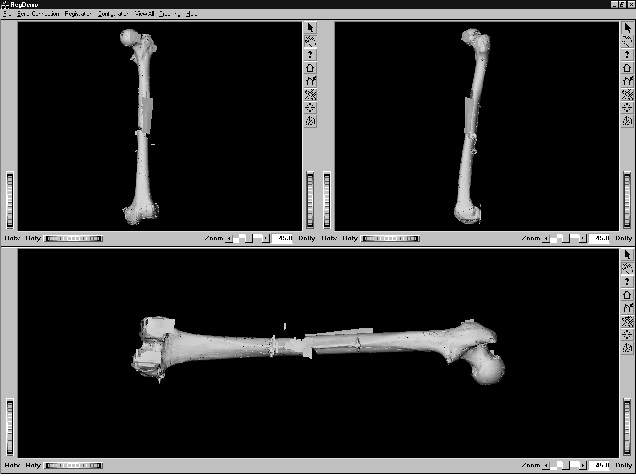
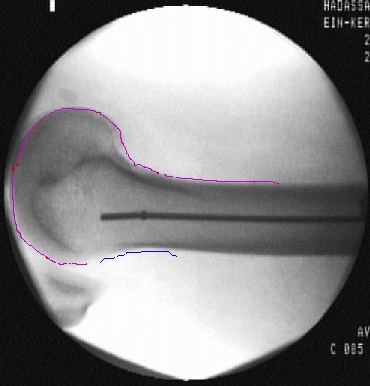
We have implemented a complete prototype of the system and integrated it with a commercial tracking device. The prototype includes modules for modeling, preoperative planning, visualization, fluoroscopic image processing, registration, calibration, and a novel targering device. The system builds 3D geometric models of the healthy and broken bones from a sequence of 2D images obtained before surgery by CT. Using the visualization module, the surgeon interactively examines the bone models, identifies the characteristics of the fracture, and determines the upper and lower bone fragments to be joined by the nail. The planning system allows the surgeon to determine the optimal length and diameter of the nail by interactively positioning a nail CAD model chosen from a catalog inside the healthy bone model. The bone fragment models are used to visualize their relative position during surgery and match the fluorosopic images. The fluoroscopic image processing module corrects the image distortion, computes the fluroscopic C-arm camera parameters, and extracts the bone contours that will be matched to the 3D bone frament models. The registration module establishes the correspondence between the model and patient reference frame.
Our current work focuses on geometric and intensity-based registration between preoperative CT images and intraoperative X-ray fluoroscopic images (2D/3D anatomy based registration), accuracy experiments, and in-vitro prototype testing. We are also considering closely related clinical applications including intramedulary nailing of the tibia and humerus. While the system is targeted to closed intramedulary nailing, many of its components can be used for other orthopaedic procedures.
![[Back]](arrow2.gif) Back to the CAS Lab Page
Last modified: January 31st, 2002.
Back to the CAS Lab Page
Last modified: January 31st, 2002.